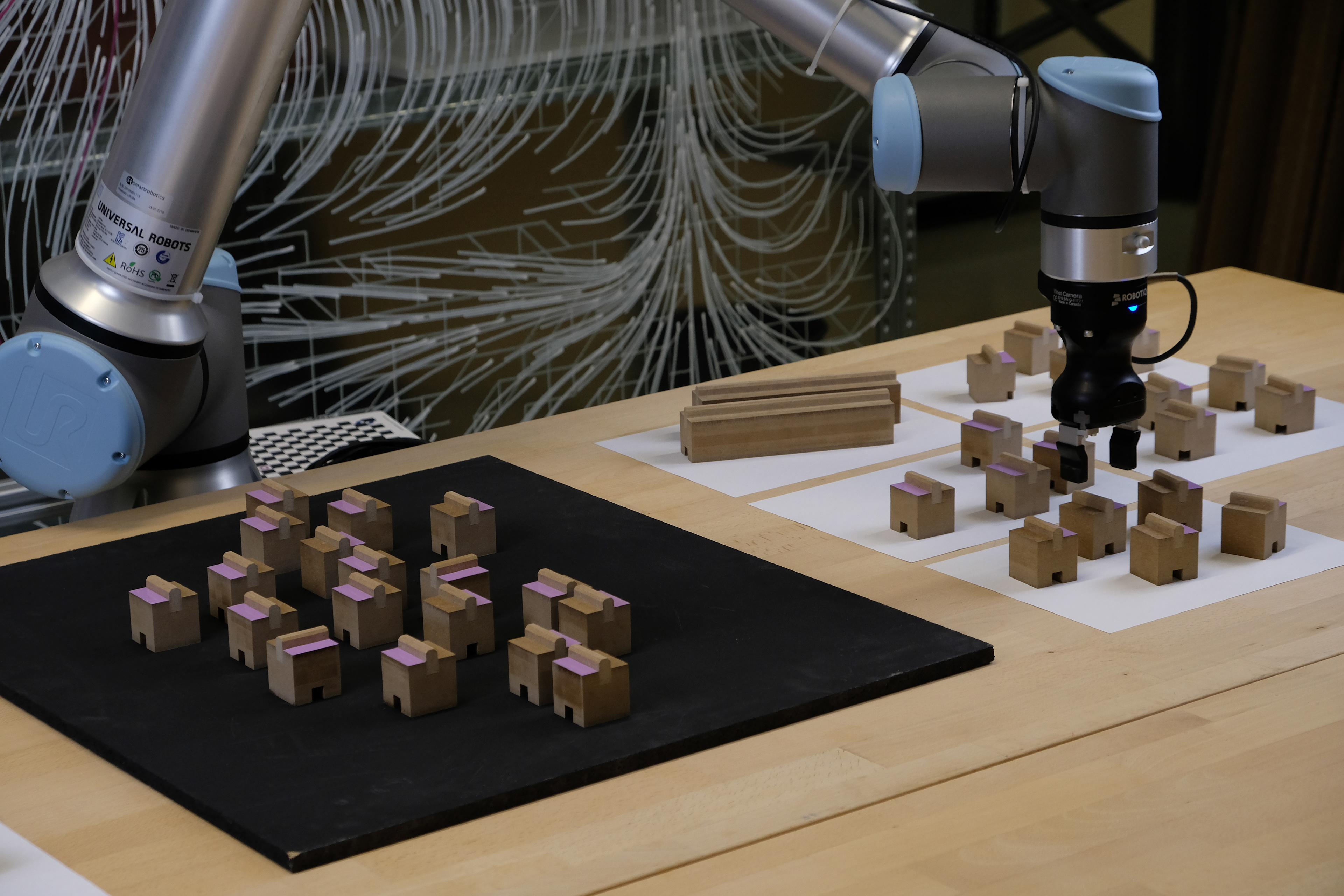
In 2021 we've been working on a project where we tried to build a component that can be assambled by a robot. Our goal was to make it stable, accurate, and easy to recognice for the robots image recognition.
After a long development process we came up with a square brick that operates with a slot and key system. To get more diversity we startet to transform the component in a repetitive way so the general dimensions stay compatible. To achieve the wanted precision we used MDF Wood und CNC milling. The UR Robot allowed us to use image recognition to assemble our aggregation. Therfore the robot can decide on its own which component he grabs.
Furthermore we used Fologram to assamble the aggregation with our hands.
With Unity we were able to create a Augmented Reality. The camera recogniced the shape of the aggregation and added a forest and humans to the scene.
Teachers: Alexandra Moisy Nicolas Stephan
Team: Victor Kuebart Vinzent Hadschieff Luca Roos
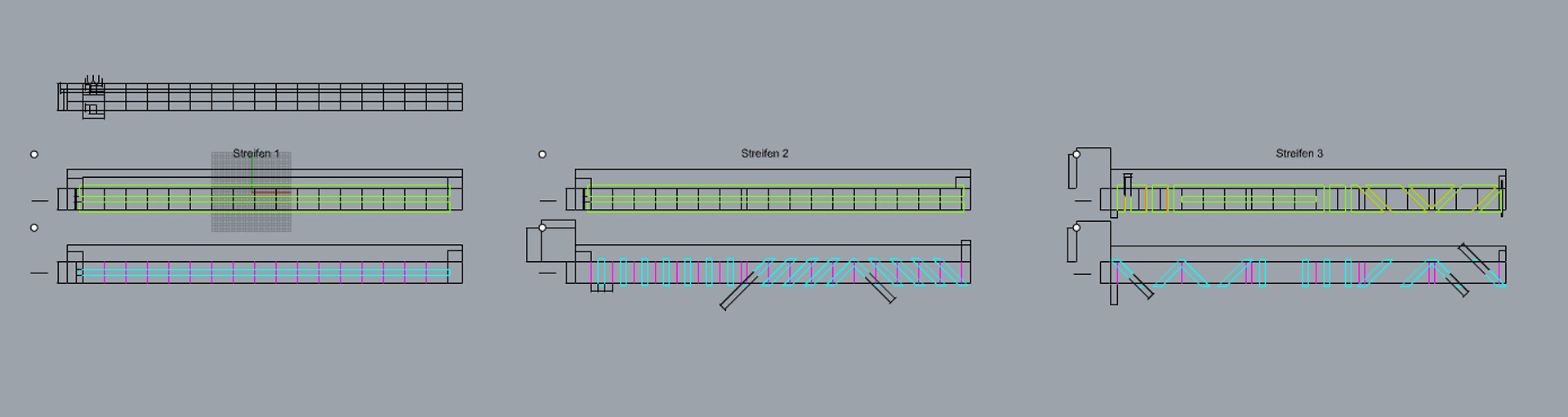

With the first prototypes we were able to find out the perfect shape and offset for the slot and key system.

We came up with different shapes that work with each other.
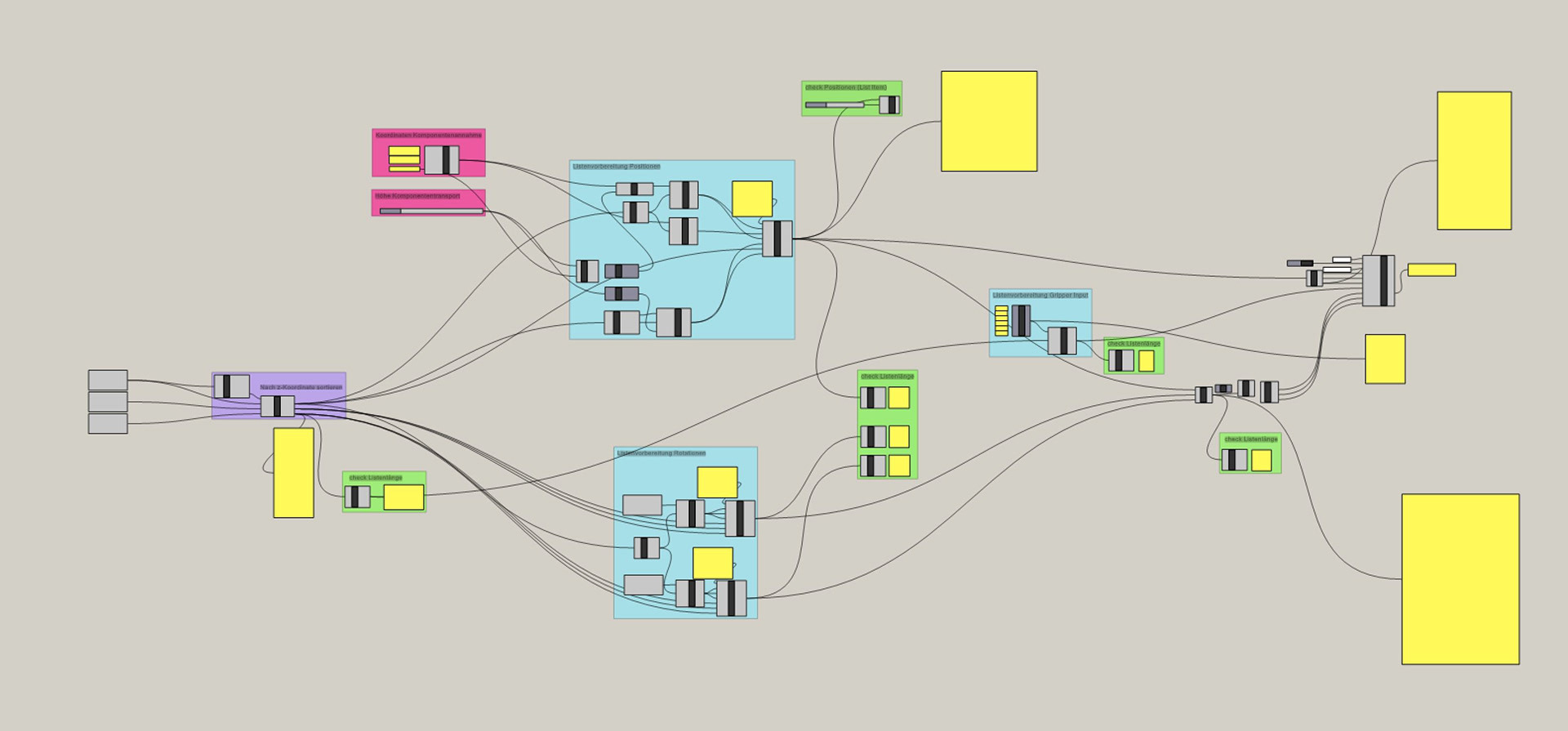
With Groshopper we could combine different ways of programming.